
|
Home | Libraries | People | FAQ | More |




Finite state machines are a model of computation that consist in a set of
states, a set of input symbols, a function that maps every tuple
(input, state) to new state and the actions performed at each
state. A complete exposition of the concept is beyond the scope of this
documentation. Here we will show how coroutines are a straightforward
implementation of this model.
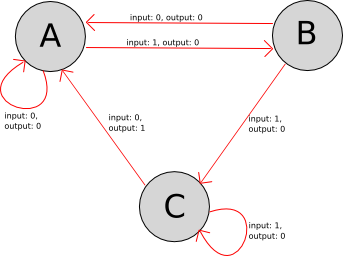
Consider a state machine that implements this behavior:
For every input, output '1' if the last three inputs where
110,0otherwise .
In practice it is a sequence recognizer.
The formal description of this state machine is the following:
States:
1 then { output 0, state = B} else { output
0, state = A}1 then { output 0, state = C} else { output
0, state = A}1 then { output 0, state = C} else { output
1, state = A}
The initial state is A. This FSM can be represented by the following
Meley model:
For example, given the input:
0110100010010001101001000111110010011001The output will be:
0001000000000000010000000000001000000100
This state machine can be implemented in C++ directly from it
definition, using a switch statement inside a stateful function
object:
struct fsm {
void operator() (char input_) {
bool input = input_ != '0';
switch(m_state) {
case A:
std::cout <<"A";
m_state = input? B : C;
break;
case B:
std::cout <<"B";
m_state = input? C : D;
break;
case C:
std::cout <<"C";
m_state = input? B : A;
break;
case D:
std::cout <<"D";
m_state = input? A : C;
break;
};
}
fsm() :
m_state(A) {}
enum state { A, B, C, D};
state m_state;
};
Each case block directly implements its corresponding state.
While the transformation is straightforward, it doesn't make the code
very readable. The simplicity of the informal description is
lost. While this code might be acceptable for machine generated and
maintained FSM, it is does not scale to large finite state machines
that must be maintained by humans.
With coroutines the straight forward transformation is:
typedef coro::coroutine<void(char)> coroutine_type;
enum state { A, B, C};
void fsm(coroutine_type::self& self, char input_) {
state m_state = A;
while(true) {
bool input = input_ != '0';
switch(m_state) {
case A:
std::cout << (input? '0' : '0');
m_state = input? B : A;
break;
case B:
std::cout << (input? '0' : '0');
m_state = input? C : A;
break;
case C:
std::cout << (input? '0' : '1');
m_state = input? C : A;
break;
}
input_ = self.yield();
}
}
We haven't gained much with this transformation. We have simply
done moved the (implicit( external loop inside the fsm and applied a
control inversion: from its internal point of view, fsm is not
longer called for each input, but calls the outside for inputs (using yield())
Let's examine the code more carefully and see if we can do better. The
m_state variable and its assignments are just carefully concealed
goto statements:
void fsm_goto(coroutine_type::self& self, char input) {
while(true) {
A:
if(input != '0') {
std::cout << '0';
input = self.yield();
goto B;
} else {
std::cout << '0';
input = self.yield();
goto A;
}
B:
if(input != '0') {
std::cout << '0';
input = self.yield();
goto C;
} else {
std::cout << '0';
input = self.yield();
goto A;
}
C:
if(input != '0') {
std::cout << '0';
input = self.yield();
goto C;
} else {
std::cout << '1';
input = self.yield();
goto A;
}
}
}fsm_goto has lost the state variable m_state. The current state of
the FSM is stored in the instruction pointer and need not to be
managed explicitly. On the other hand the control flow of the code has
become explicit and arguably more readable. Then again, calling
readable a code full of gotos might be a stretch. Let's complete the opera
and do the final transformation:
void fsm_structured(coroutine_type::self& self, char) {
while(true) {
if(self.result() != '0') {
std::cout << '0';
self.yield();
if(self.result() != '0') {
std::cout << '0';
self.yield();
if(self.result() == '0') {
std::cout << '1';
self.yield();
} else {
std::cout << '0';
self.yield();
}
} else {
std::cout << '0';
self.yield();
}
} else {
std::cout << '0';
self.yield();
}
}
}
We used result(). The sequence of ifs represent
exactly the informal requirement of matching the sequence 110.
Whether the above FSM implementation is more readable of
the first implementation is arguable. But it is easier to generalize
it. The repetition of if statements is a strong hint that the code
should be refactored:
typedef boost::function<void(coroutine_type2::self&)> action_type;
typedef coroutine<char(char)> coroutine_type2;
void terminator(coroutine_type2::self&) {}
void match(coroutine_type2::self& self, char match, char out1, char out2 , action_type act, action_type act2) {
if(self.result() == match) {
self.yield(out1);
act(self);
} else {
self.yield(out2);
act2(self);
}
}
char fsm_match(coroutine_type2::self& self, char) {
action_type s3 (boost::bind(match, _1, '0', '1', '0', terminator, terminator));
action_type s2 (boost::bind(match, _1, '1', '0', '0', s3, terminator));
action_type s1 (boost::bind(match, _1, '1', '0', '0', s2, terminator));
while(true) {
s1(self);
}
}
 We use
We use boost::function because if match where templated on the
action type, the compiler wouldn't know which match to pass to
boost::bind. There are more efficient solutions, but this is the
most compact and simple. |
match chooses what symbol to yield and what action to follow
by checking if the last parameter to the coroutine is equal to the
symbol to be matched.
The structured FSM can be extended to match
more complex patterns. For example a matcher for the regular expression (01+010)
can be written as:
void fsm_regexp(coroutine_type::self& self, char) {
while(true) {
if(self.result() == '0') {
std::cout << '0';
self.yield();
if(self.result() == '1') {
std::cout << '0';
self.yield();
while(self.result() == '1') {
std::cout << '0';
self.yield();
}
std::cout <<'0';
self.yield();
if(self.result() == '1') {
std::cout << '0';
self.yield();
if(self.result() == '0') {
std::cout << '1';
self.yield();
} else {
std::cout <<'0';
self.yield();
}
} else {
std::cout <<'0';
self.yield();
}
} else {
std::cout << '0';
self.yield();
}
} else {
std::cout <<'0';
self.yield();
}
}
}Generalizing this example is left as an exercise for the reader.
Notice that the above FSM will fail to match the last six digits of this pattern:
011011010
This because when it sees the fourth 1, while it was expecting a 0,
the state machine does not backtrack to match the 1+ pattern, but
returns to the beginning of the pattern and tries to find a 0.
It is possible to implement backtracking elegantly with coroutines
using a goal driven design, but it is beyond the scope of this
document. See the example complex_matcher.cpp for more details.
| Copyright © 2006 Giovanni P. Deretta |